
决策树作用
· 我们之前学习的算法都是用于连续性的数据的,对于像Excel表格中的离散型的数据,我们没有办法求导,即没办法用我们之前的算法。
· 而决策树就可以作用于离散型数据。
· 接下来我们从一个分类任务,来看决策树。
ID3构建决策树
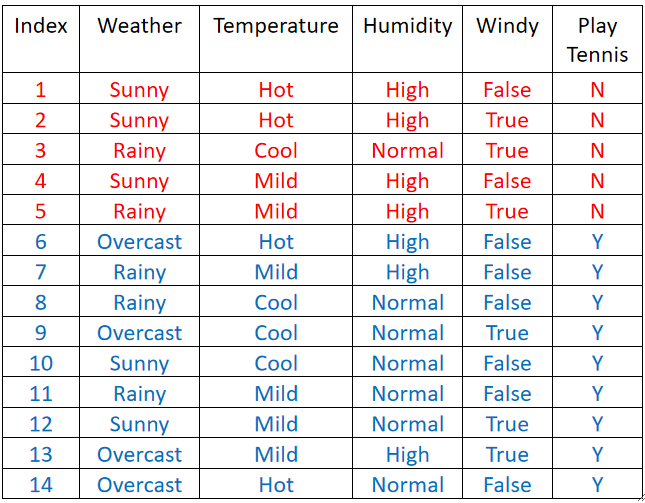
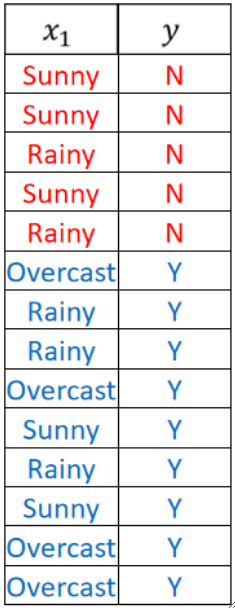
· 如下表格所示,我们需要做一个二分类任务,即打/不打网球:
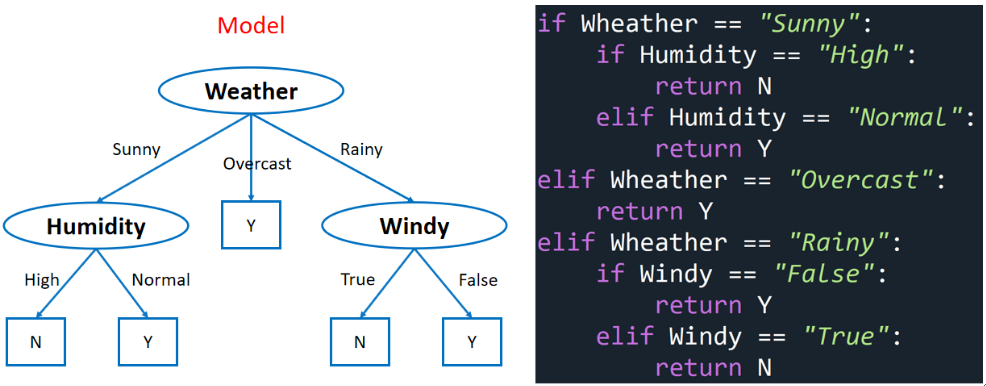
· 假设我们训练好了一个决策树,其实模型本质上就是if-else语句的集合:
贪心启发式算法
· 构建决策树的时候,我们使用的贪心启发式算法(Greedy Heuristic)就是每次都把所有指标算一遍,选出分的最好的指标作为本次的指标。
· 值得注意的是,因为我们选择的是贪心的算法,所以建出来的树的结果不一定是最好的。
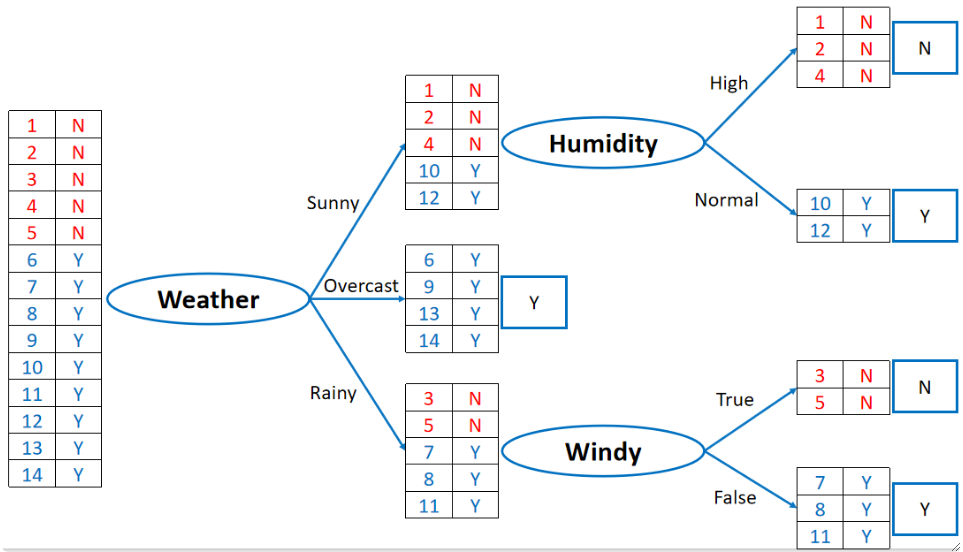
· 如下图,它分的过程是:
在Weather、Humidity、Windy、Temperature中都把所有样本过一次,发现Weather分的最好,因为Overcast分出来的都是Y,然后我们选它作为第一层
然后,对于Sunny之后,我们又跑一次Humidity、Temperature和Windy,跑完之后发现Humidity能分的最好,而且已经能把所有样本都分开了,可以结束;同理Rainy之后又跑一次Humidity、Temperature和Windy,发现Windy分的最好,而且已经能把所有样本都分开来了,可以结束。
· 我们引入一个概念——熵(Entropy),用来衡量一个分类结果的不纯度,或者说,不确定性。
惊讶程度(Surprise)
· 在定义熵之前,我们先定义另一个概念——惊讶程度(Surprise)。
· 惊讶程度与事件发生的概率成反比,比如每天都看到太阳从东边升起,惊讶程度低,但如果你看到太阳从西边升起,那惊讶程度就非常高了。
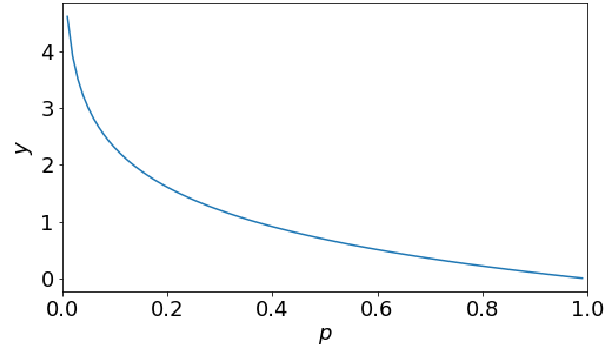
· 用数学公式去定义惊讶程度,其实就是定义一个反比例函数即可:
其中P是事件u发生的概率v,画出函数图像如下:
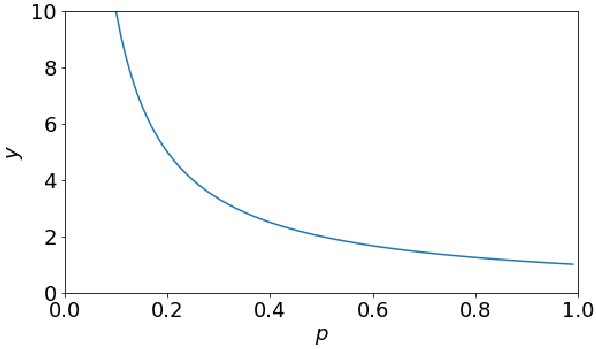
· 但是我们可以发现,当事件的概率是1的时候,惊讶程度也是1,这不是我们所希望的,按理来说是0才比较好。
· 优化一下定义,引入对数,惊讶程度的定义就可以变为:
这样当概率是1的时候,惊讶程度就是0了:
· 一般来说,我们的log都是以2为底的,因为决策树不需要求导,但其实用e也无所谓。
· 有了惊讶程度,我们就可以定义熵了。
熵(Entropy)
· 我们把熵定义为惊讶程度的期望,数学公式如下,其中C为类别的数量:

· 举个例子,投一个硬币,出现Head的概率是0.9,出现Tail的概率是0.1,那么:
计算Head和Tail的惊讶程度,代入S=-logP得出Head的惊讶程度是0.15,Tail的是3.32
那么这个事件的熵就是:0.9*0.15+0.1*3.32=0.47
*交叉熵与熵进行比较
· 我们所熟知的交叉熵的定义如下:
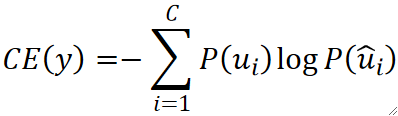
· 其中C是类别的数量,P(u)是标签y,P(u hat)是模型的输出,即预测值。
· 和熵对比,人类很难确切地知道真实概率P(u),同时,惊讶程度也是一个很主观的概念。
信息增益(Information Gain)
· 我们不能只用熵,而是需要通过信息增益来评价每一个分类的好坏,因为熵只是一个类里面某一组分的好不好,我们需要知道的是整个类分的好不好。
· 我们通过一个例子来看如何计算信息增益:
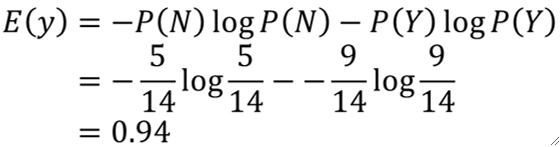
给出一组数据,N的概率是5/15,Y的概率是9/14,然后我们计算它原本的熵是:
如果我们用Weather去分,可以分成Sunny、Rainy和Overcast三堆。
对于Sunny,有5个,其中3个是N,2个是Y,计算Sunny的熵有:

同理,对于Overcast,N有0个,Y有4个,计算Overcast的熵有:

我们把0log0定义结果为0;其实根本不用算,因为确定Overcast都是Y的,所以熵必为0。
同理,对于Rainy,N有2个,Y有3个,计算其熵为:

三个都算完了,我们就可以计算信息增益了:

可以看到,其实就是原来的熵减去分完后的熵的期望,我们希望这个值越大越好,因为这代表差距越大,那么熵下降的越多。
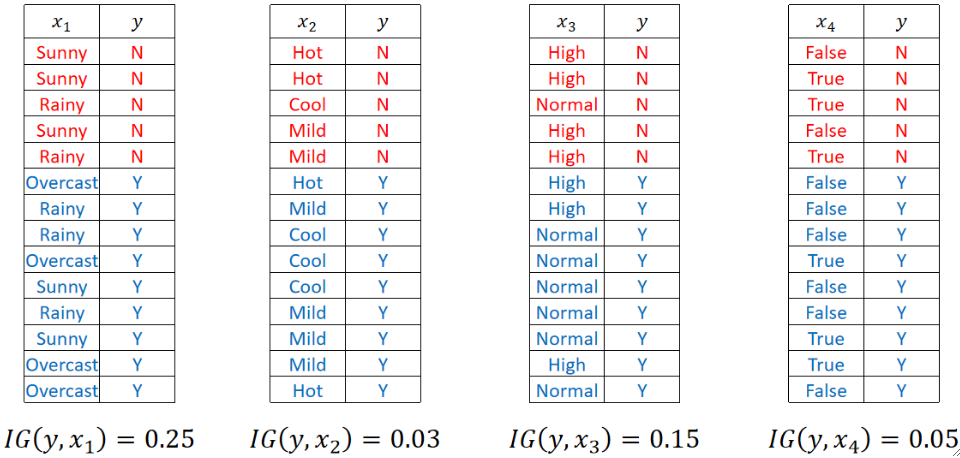
最后,我们把剩下的三个特征的IG都算一下,可以发现Weather的是最大的,所以我们第一层就选Weather:
· 我们给这种计算决策树的方法起个名字,叫它ID3。
· 但是ID3这种算法有一些缺点:
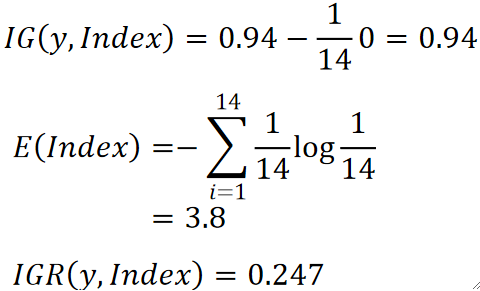
如果某一种特征的取值的可能性特别多,那它会更倾向于选这种特征,比如我们把Index,即标号作为特征,因为每一个标号都是唯一的,即可以分出14个组来,每个组只有一个值,这样算出来它的熵就是0,IG就会非常大,那么ID3就会选择它,但很明显我们知道Index这个指标是无意义的。
该算法不支持连续的值(虽然决策树本来就是用来解决离散的值的,但还是想改进一下)
该算法不支持剪枝。
· 因此,C4.5算法就被提出了。
C4.5构建决策树
信息增益比(Infomation Gain Ratio)
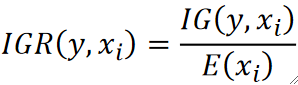
· C4.5算法的核心就在于引入了信息增益比,它把信息增益除了一个熵:
· 这样做有什么好处呢?还是拿上面的例子,如果我要引入Index作为特征,那它算出来的IG会很大,但没关系,它的熵E同样也很大,因为它种类很多:
· 这样一除,IGR就会比较小。最后比较这个IGR去选择特征。
连续值
· C4.5还考虑了当值是连续的时候的情况。
· 比如我们的例子中的湿度Humidity,它理论上来说是一个连续的值,假如说数据如下:
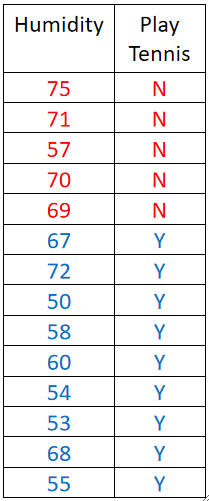
· 首先先给数据排个序,然后依次尝试所有的二元切分,下面展示了三次:
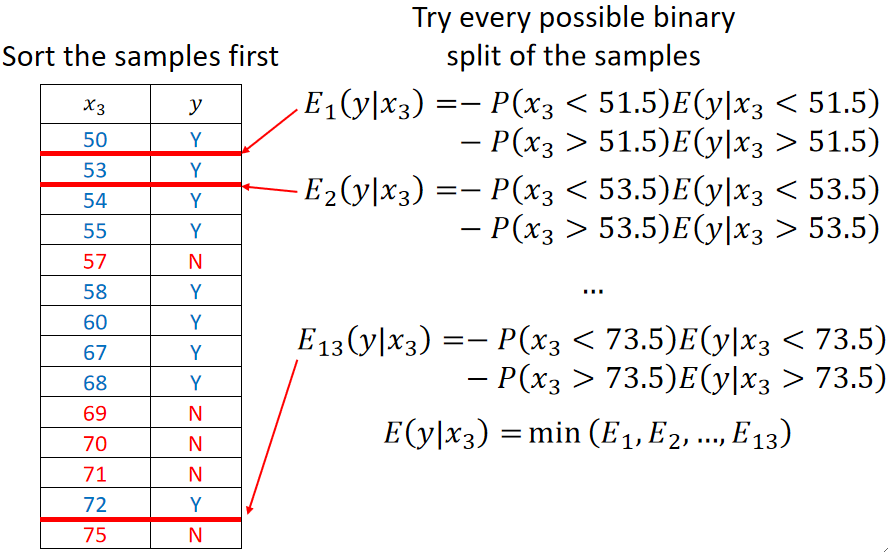
· 假设现在选上了x3作为特征,其分割方式就是大于73.5还是小于73.5,那其实x3在后续还可以继续作为特征,因为小于73.5的时候,还可以再切很多次,考虑很多次这个特征。
· 也就是说,对于这种连续的值,我们可以对其进行复用,因为分完之后还能再分。
· 而离散的值是不能复用的,因为分完之后该组里面这个值就已经确定了,不能再分。
剪枝
· C4.5是支持剪枝的算法。
· 预剪枝(Pre-pruning):
即边建边剪。
在一开始没有选择任何特征进行分类的时候,根据N和Y的比例进行预测,得出一个准确率。
然后在选择一个特征作为分类节点的时候,再使用一样的验证集进行预测,如果准确率上升了,就继续往后建立节点;如果准确率下降了,那就直接停止,不再建树。
· 后剪枝(Post-pruning):
即先把树建好,再剪枝。
然后我们使用一个验证集来过一遍树,得出一个准确率。
然后我们开始剪枝,挑选一个节点,把它删掉,然后再过一遍验证集,如果准确率上升了,那就把这个节点剪掉并继续尝试删除其它节点,如果准确率下降了就停止删除节点。
算法特点
· C4.5在连续值上不支持回归。
· C4.5的一个节点可以有多个分支。
· 因此CART算法被提出
CART构建决策树
基尼指数(Gini Index)
· CART算法的特点就在于引入了基尼指数,通过它可以确定一组数据的混乱程度,和熵具有类似的意义,它的计算公式如下:

· 比如,对于某个特征y包含14个样本里面有5个N和9个Y,可以算得其基尼指数为:

· 如果P(N)=0或P(Y)=0都可以得出y的基尼指数为0,这和熵的结论是一样的。
构建过程
· CART和ID3一样,构建的决策树都是二叉的,不是C4.5那种多叉的。
· 所以对于一个特征内的多个类别,我们只需要分成是或不是该类别即可。
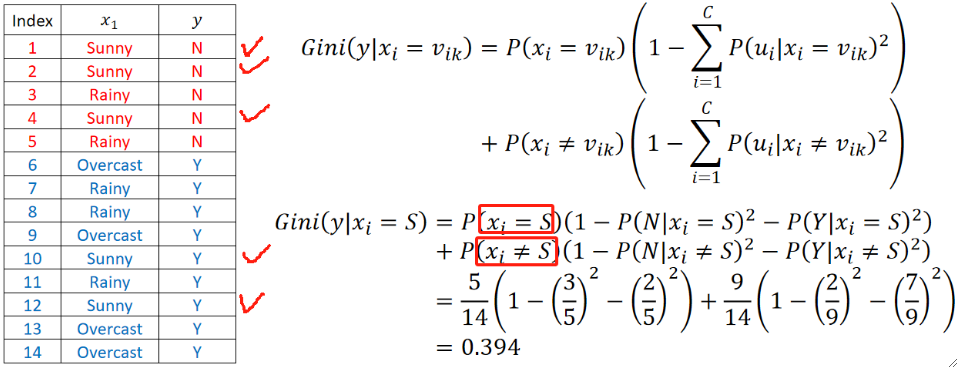
· 我们以刚刚Weather这个特征来举例,他有Sunny、Rainy和Overcast:
先算Sunny的基尼指数,就是算是或不是Sunny,注意要乘上一个期望:
同理,计算Rainy和Overcast的基尼指数:
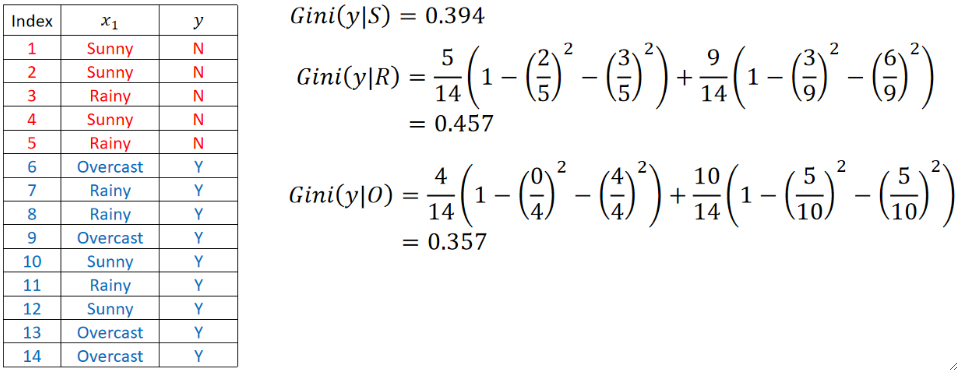
最后,选择基尼指数最小的Overcast作为这一层的分支。也就是一边是“Weather是Overcast”,另外一边是“Weather不是Overcast”。
· 值得注意的是,因为CART只分为两种,所以在“Weather不是Overcast”的下面还可以分“Weather是Sunny”和“Weather是Rainy”,即还是可以复用的!